Bionics Kit – Three animal robots from one construction kit.

The Bionics Kit, with a focus on moving and grasping, contains the material to build three different bionically inspired projects:
The special feature of this construction kit: Since the projects are completely disassembled into their individual components after assembly, three models can be created from one construction kit. A construction kit can be worked on jointly by up to four learners.
As basic equipment, the kit contains all necessary interface elements. These include small servo motors, compatible electronic and mechanical components, or plastic elements such as Fin Ray® structures. Festo Didactic won the World Didactic Award 2018 with this Bionics Kit.
If you are interested in doing your own developments with the Bionics Kit, here are some examples regarding programming and 3D printing.
You are interested in the Bionics Kit? Get in touch!
All animal robots are driven by servo motors and controlled by an Arduino-compatible microcontroller. The movements are controlled via a Bluetooth connection to the smartphone or via a mobile device or PC. No programming knowledge is required.
With the help of the corresponding teaching materials, the learners are guided through the assembly steps. The contents are intended to help the learners with assembly and programming and provide the teachers with biological, methodological background material.
The assembly instructions for each animal robot will help the learners to build their own robot. Step-by-Step instructions via PDF will guide the learners through the assembly process.
Did you ever wonder why the fin of a fish is so special, the elephants trunk has so many muscles or how the tongue of a chameleon works? For each animal robot there is a tutorial video available, where detailed information on how to build your own robot are given.

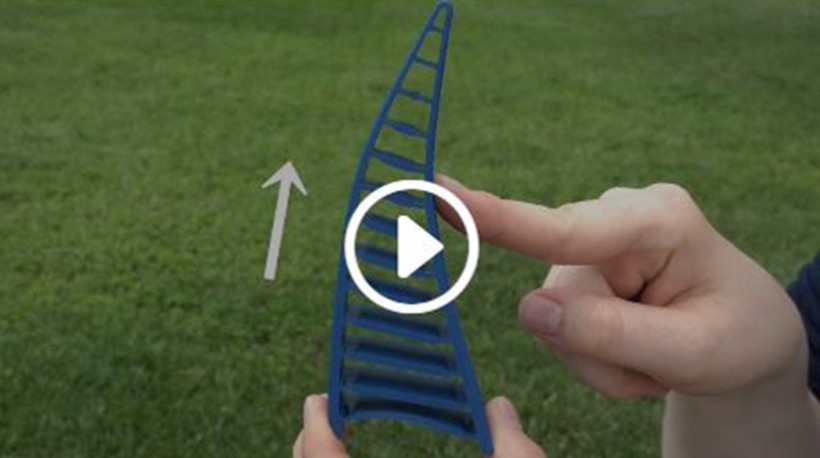
When a bionics specialist named Leif Kniese was fishing in Norway, he noticed that the fins of bony fish have interesting mechanical properties. When he pushed his finger against the tail fin of the fish he caught, it did not bend away. In fact, the opposite happened; the tail fin bent in the direction of his finger. Upon further examination, he discovered that the reason for this was the structure of the tail fin. The bones of the fin consisted of two cartilaginous longitudinal rays. These longitudinal rays are connected by elastic tissue, which is why they move towards each other in the event of a load. The technical implementation of this structure resulted in the development of the Fin Ray Effect. The basic element is an acute triangle constructed with flexible sides. The two sides are connected using braces or ribs. The Fin Ray Effect is an example of the bottom-up biomimicry design process, where scientists study a natural phenomenon and then apply it to solve a technical problem.
Watch the video to learn more. When you are finished, click on the pdfs for a Fin Ray craft sheet template. Once you create your Fin Ray, take time to examine how this technical solution can help you with your bionic robot.
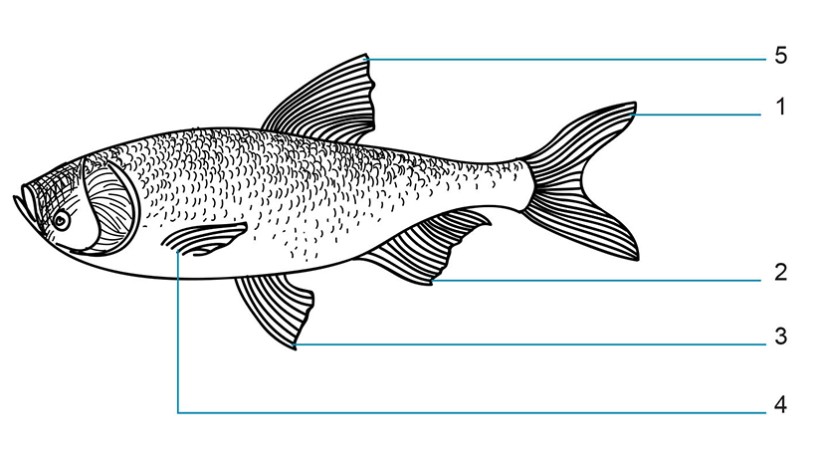
With more than 15,000 species, the bony fish are the largest group of fish. The bony fish have a bony skeleton, like the name suggests. Each of the fins on a bony fish have a specific purpose. The caudal (tail) fin [1] helps with steering and controls the speed of forward movement. On a bony fish, the upper and lower lobes of the caudal fin are symmetrical. The anal fin [2] helps the fish with stability, making sure the fish doesn’t roll from side to side. The pair of pelvic fins [3] assist with balance and steering. They also act as brakes to slow the fish down. The fish uses its pectoral fins [4] individually to turn in either direction or control up and down movement. The dorsal fin [5] acts like a keel on a boat and helps keep the fish upright and stable.
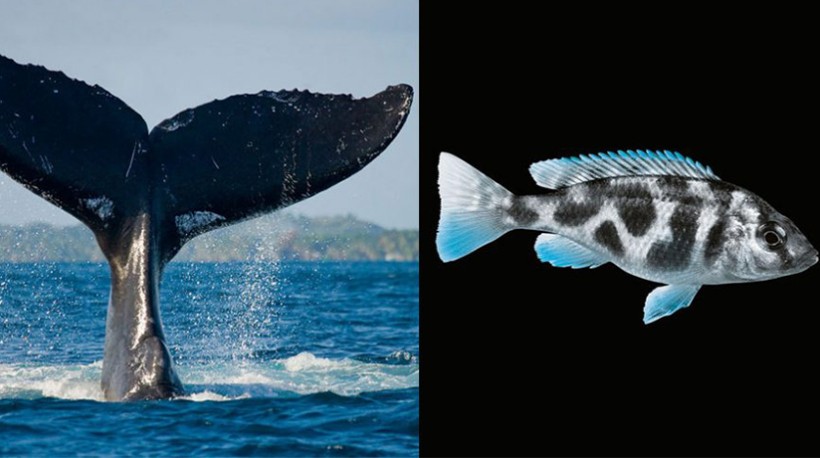
Marine mammals, such as whales and dolphins, have fins and a tail to help them swim and stay upright (just like fish), but these similarities are in appearance only. Marine mammals move with the help of their horizontal tail. Their tail flaps up and down to propel them through the water. Fish move through the water thanks to their vertical tails, which move from side to side.
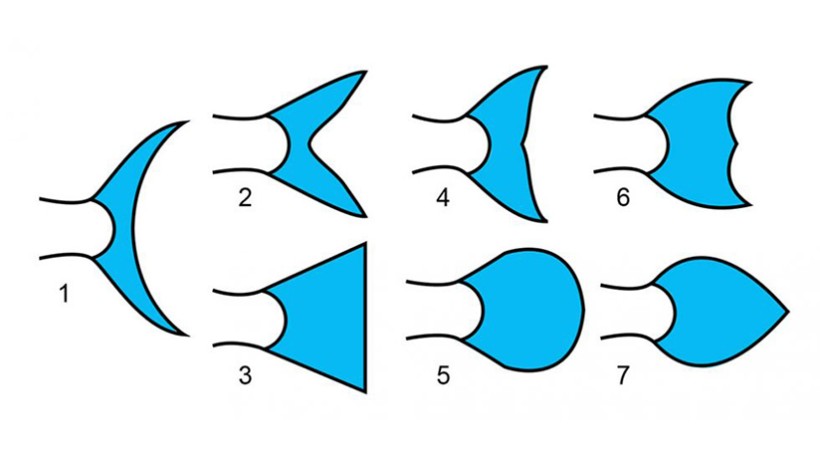
Listed are some basic fish tail shapes:
1. Lunate or crescent
2. Forked
3. Truncate
4. Emarginate
5. Rounded
6. Double emarginate
7. Pointed

Ever wonder how fish have enough energy to stay afloat all day? It’s because of their swim bladder. This organ keeps the fish from sinking. Fish have body tissues denser than water, so the swim bladder, which is like a balloon inside their bodies, fills with gas to create buoyancy. This counteracts the fish’s weight. In addition to creating buoyance, the muscles around the swim bladder can contract its size, reducing the volume so the fish displaces less water; the fish is heavier and can now sink. The swim bladder allows fish to control their buoyancy, and because the dorsal position of the swim bladder, the center of mass is below the center of volume. This allows it to perform as a stabilizing agent. Since most fish make allowances for their weight using their swim bladder, you must find a way for your robotic fish to balance itself. One suggestion is to fill a small plastic bag with screws/nuts and attach it to your robotic fish. You may have to test the amount and position a few times before you’re successful.

An elephant’s trunk provides a fascinating model for technology. The roughly 40,000 muscle bundles in an elephant’s trunk make it very flexible, highly compliant, and capable of transmitting large forces. An elephant’s trunk is a muscular hydrostat, which means it’s a boneless muscular structure that allows for its excellent maneuverability. It is composed of muscles, vessels, nerves, fat, and other connective tissues, and skin. Did you know that the trunk is both extremely delicate and extremely strong? The finger-like tips at the end of an elephant’s trunk is used to clasp smaller objects. It’s even used to wipe or clean the elephant’s eyes. On the contrary, the trunk is so powerful it can pull out trees!

Chameleons are fascinating creatures. They can move their eyes independently of each other and change their color depending on their mood and temperature. Another special feature is their hunting strategy. With the unique way they shoot out their tongue, they can attack as quick as lightning and securely fetch back their prey.
A chameleon’s characteristics
A chameleon’s tongue possesses the unique combination of force and form fit. This is observed when the chameleon is on the hunt for insects. Once the chameleon has its prey in its sights, it lets its tongue shoot out like a rubber band. Just before the tip of the tongue reaches the insect, it retracts in the middle, while the edges continue to move forward. This allows the tongue to adapt to the shape and size of the respective prey and firmly enclose it. The prey sticks to the tongue and is pulled in like a fishing line!

To successfully assemble a robotic animal, you must first consider what the steps or work packages are, the optimal order in which they should be completed, and how much time you want to spend on each step so that a functional robot is created by the end of the project period. It is important that you have defined appropriate responsibilities in the team and that there is agreement on the project goal.The following questions will help you and your project team to think logically about the implementation.
Partial goals give each individual and the whole team an overall goal to focus on and work towards. Every action of the team should be aimed at leading the project along the goals to success.Once you have defined the goal, you can identify and assign tasks. Determine who does what, when and why.
There is a list with working packages available you can use for inspiration. They will guide you through the necessary steps to successfully build one of these three bio-inspired robots. Together with the “Project Plan” template you can develop a project plan that identifies tasks assigned to each team member that need to be completed within a certain time frame. Project plans provide a simple visual overview of a project from start to finish and lead to a higher work efficiency of the team members.
Have a look at our curriculums.

Science
Technology
Engineering
Math
Assembly instructions from 2022 on
Assembly instructions (2019-2021)
Project management
Additional downloads
Elephant
Fish
Chameleon
Reflash Bionics Kit (Fish, Elephant, Chameleon):
NOTE: please download this file, if you are experiencing issues with the microcontroller. Arduino IDE is not required for this quick update.
LX Course
FAQs and legal information
core range